
Skydel Simulation Engine |
|
|


Flexible GNSS Simulator
Fully-featured, software-defined
|
Orolia’s Skydel Simulation Engine offers the best of both worlds: the performance you expect from a top-grade GNSS simulator, coupled with the economy of scale and flexibility of the GPU/SDR architecture. Packed with a rich feature set including a 1000 Hz simulation iteration rate, remote control from user-defined scripts, and a virtually unlimited number of channels, Skydel offers unmatched flexibility and scalability. And all of this, packaged in a well-thought-out user interface. |
|
|

Skydel is a fully-featured, software-defined GNSS simulator.
With Orolia’s Skydel, you can either:
|
Select a turnkey system
|
Select the software only and use/reuse your own hardware.
|


In both cases, you obtain a complete, real-time GNSS simulator using repurposable hardware. The Skydel Simulation Engine supports multiple constellations (GPS, GLONASS, Galileo, BeiDou) and multiple frequencies (upper and lower L-band).
Skydel is also available through Orolia's partners who can create specially tailored solutions for your specific needs.
The Concept Behind Skydel
|
Traditional GNSS simulators rely on FPGAs and custom-designed hardware which are either too expensive or provide limited capabilities. Orolia’s Skydel Simulation Engine uses GPU-accelerated computing and software-defined radios (SDR). This architecture is based on mass-produced hardware which benefits from an economy of scale and high performance. Moreover, it enables additional capabilities only possible with a software-defined approach to GNSS simulation.
|
 |
Benefits
Create economy of scale and eliminate hardware dependency. COTS hardware free users from dedicated platforms, while generic hardware allows to repurpose equipment for different projects. Skydel solutions are scalable and easily upgraded.
Exploit the unique capabilities of a software-defined GNSS simulator. Dynamic jammers, custom waveforms, faster-than-realtime simulation and selectable RF/IF frequency are just a few possibilities enabled by the software-defined approach.
Key Features
|
Powerful AutomationGet ultimate control with Skydel's powerful API. Easy to use and comprising hundreds of commands, this API brings an unparalleled level of control over the simulation. It allows the user to build highly complex, elaborate and repeatable scenarios. Skydel comes with open source client libraries for Python, C# and C++. |
Aerospace-ReadyTrajectory simulation from the ground up to GEO orbits. The user-friendly interface allows you to configure Earth-orbiting spacecraft trajectories, atmospheric models, multiple GNSS constellations and 3D antenna patterns. |
Differential GNSS and Multi-Vehicle SimulationMulti-vehicle positioning data can greatly improve GNSS location accuracy. For example, in Real-Time Kinematics (RTK), a rover precise location is computed by using base station position data. Orolia’s Skydel does multi-constellation, multi-signal differential GNSS by synchronizing multiple simulators. For RTK applications, each instance of Skydel will simulate the GNSS signals for either vehicle. |



Key Features
-
1000Hz simulation iteration rate
-
Low-latency HIL
-
Live sky time synchronization
-
On-the-fly scenario reconfiguration
-
6 Degrees of Freedom (DoF) receiver trajectories
-
Flexible licensing
-
In-field upgradability
-
High-end performance (precision, resolution, ultra-high dynamic motion)
-
Simulate hundreds of satellites in real time, using off-the-shelf graphics cards (GPU)
-
Multi-vehicle simulation
-
Comprehensive and intuitive API (Python, C# and C++ open source client)
-
Scalable and highly flexible architecture using software-defined radios
Signal Propagation and Errors Simulation
-
Multipath
-
Additive pseudorange ramps
-
Satellite clock error modification
-
Navigation message errors
-
Multiple ionospheric models
-
Multiple tropospheric models
-
Antenna pattern models
-
Relativistic effects
-
Pseudorange/ephemeris errors
-
Custom signals injection
Signals
-
GPS: L1C, L1-C/A, L1-P, L2-P, L2C, L5
-
GLONASS: G1, G2
-
Galileo: E1, E5a, E5b, E5AltBOC
-
BeiDou-2: B1, B2
-
Beidou-3: B1C, B2a
- SBAS: WAAS, EGNOS, MSAS, GAGAN, SDCM
Signal Specifications
-
Pseudorange Accuracy - ±0.001m
-
Pseudorange Rate - ±0.001m/s
-
Inter-channel bias - zero
-
Spurious transmission ≤ 45 dBic
-
Harmonics ≤ 45 dBic
-
Signal Dynamics1000 Hz iteration rate
- Maximum relative velocity: 1,500,000 m/s
- Maximum relative acceleration: No limits
- Maximum relative jerk: No limits
- RF Signal Level (GNSS)
- Power Accuracy: +/- 0.5dB
- Output reference power: -80 to -50 dBm, 0.1dB resolution
- Dynamic range (relative to reference power): -45 to +30 dB
- Total range: -125 to -20 dBm
- RF Signal Level (Jamming)
- +0 to +110 J/S (with signal (S) reference power at -130dBm)
- +0 to +110 J/S (with signal (S) reference power at -130dBm)
Click The Screenshots For Enlarged Versions
|
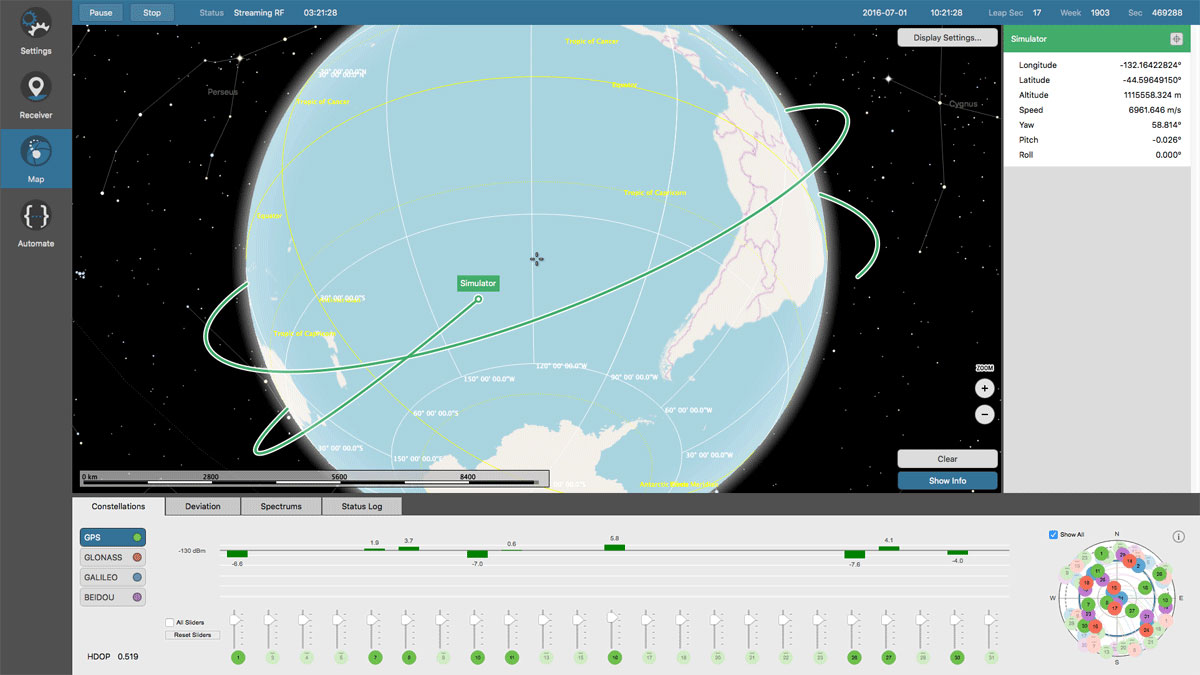
Scenario editor with integrated street maps |
Trajectories simulation from the ground up to GEO orbits |
Easy comparison between simulation and receiver information |

Advanced Interference Simulation
|
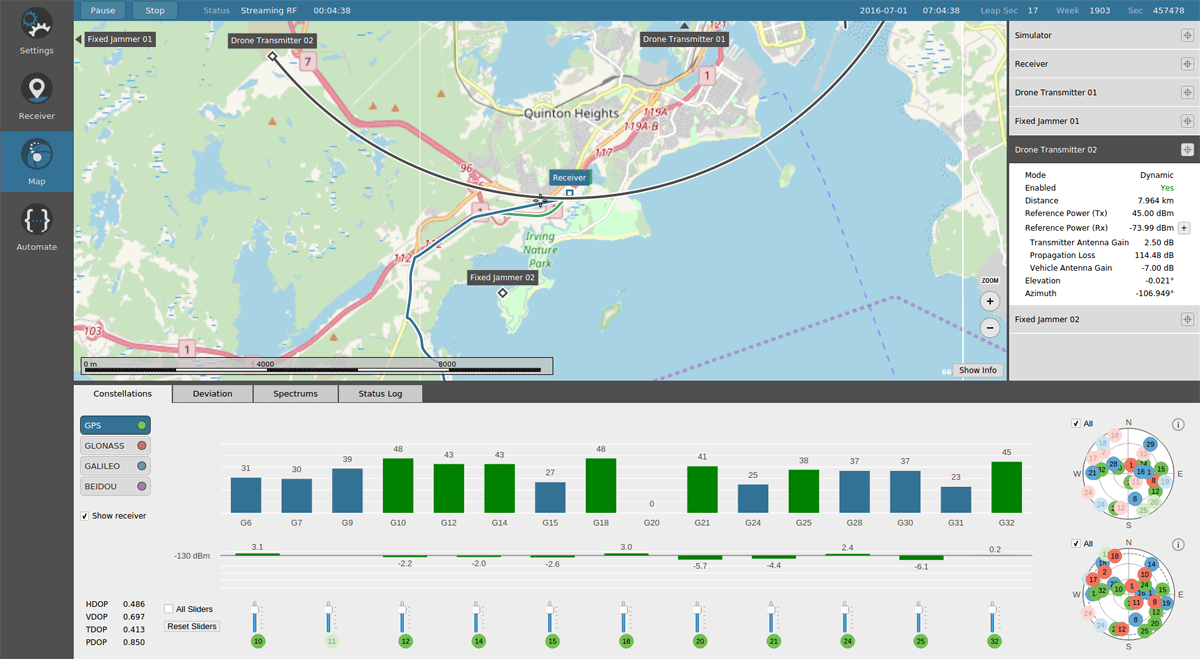
Skydel’s unique architecture delivers the most flexible and powerful GNSS interference testing solution on the market. With the Advanced Jamming module enabled, you can create interference transmitters, assign them signals and trajectories, and watch them interact with the receiver from within the map panel, all in real time. To complete Skydel's use as an interference testing solution, the powerful and easy-to-use Advanced Jamming Module also enables the creation of custom RF waveforms. Advanced jamming is completely integrated into Skydel. There’s no need for additional and complicated connections with third-party modules. Everything is achieved through the same unique software interface.
|
Advanced Jammers in action. During the GNSS simulation, Skydel calculates the signal at the receiver antenna and takes into account the transmitter antenna pattern, propagation loss, and receiver antenna pattern. Click to enlarge. |

Multiple Synchronized Trajectories
|
The software-defined nature of Skydel enables multiple instances of the GNSS simulator to run on the same –or multiple– computer(s). This feature offers research and test labs interesting possibilities for creating advanced simulation setups. When synchronizing simulators, parameters such as radio and antenna settings, vehicle trajectories, or interference transmitters can be shared between all instances. For other use cases, Skydel users can decide which parameters are automatically synced between connected simulators. Possible applications of connected simulators include the simulation of:
|
|
Example showing Skydel GNSS simulators used to recreate 4 drones using Real-Time Kinematics (RTK) for precise positioning |

Resources
| Supported Software-Defined Radios |  |
| Channel Cabilities per GPU | |
| Skydel Datasheet | |